Table of Contents
Navigation
Global Navigation Satellite Systems GNSS
Introduction to the GNSS
Global Navigation Satellite Systems (short GNSS) are useful to position an object (here drone) in 3D space, mostly outdoors.
Actually, 2D, planar (longitude/latitude) positioning is quite good, and in most applications suitable, vertical positioning used to be inaccurate, so most drones use a different strategy to check their altitude, mostly measuring atmospheric pressure changes (using barometer). UAVs usually operate on long distances (some meters to even thousands of kilometers), so satellite-based positioning seems to be a reasonable choice. As receivers became cheaper, they appeared in almost all drones that operate in autonomous mode and in many of those that are manually controlled, to smoothen operations, provide rescue features (i.e. Return to Home function) to ensure basic and advanced features like, i.e. geofencing, collision avoidance and so on.
Current, modern GNSS receivers operate with multiple constellations parallel, delivering even better accuracy of the planar positioning. Still to get reliable positioning with high accuracy, one needs to ensure good satellite visibility.
There are several factors, decreasing positioning that every UAV operator should be aware.
There is a number of factors, decreasing positioning that every UAV operator should be aware of, as they may lead to incidents and accidents:
- Time synchronization - it is crucial to have a common time-base for both sender and receiver. Time synchronization occurs during the so-called “obtaining fix” and in short is based on error minimization between position estimation based on at least four (usually much more) satellites. Time synchronization is also performed periodically, as satellite time-base is considered as a reference one, but receiver implementation varies in quality. Thus you may observe periodical degradation of the accuracy in reference conditions, because of the de-synchronization of the receiver.
- Selected Availability (SA) - as introduced by the constellation owner to interfere radio signal of the satellites, thus decrease the accuracy of the controlled way. This was widely used in the case of the American GPS (Navstar) until the first war in the Persian Gulf when US Army had to switch to the commercial receivers (affected by SA) because of lack of delivery of the military products (that had SA corrected internally). Since then, GPS positioning became much more useful because of the increased accuracy of the positioning, once SA was disabled or at least reduced.
- Ionosphere delay - as solar radiation has a strong impact on the ionic sphere of the Earth, radio signal passing through it may experience deflection (thus delays). That is the second, natural phenomenon, decreasing accuracy. Solar radiation is given by the KP Index that can be read close to real-time and is related to solar activity. With KP over 3, flying UAV is not advised, or at least try to avoid flying in a tight environment when filming, i.e. northern lights as you may experience sudden shifts of your drone even some dozen of meters. You can read the current KP index and forecast, i.e. here: Aurora Service.
- Troposphere - has some minor impact (comparing to the mentioned above) yet it does exist. The troposphere is relatively thin, comparing, i.e. to the ionosphere. Advanced GPS receivers may use a built-in calendar to provide thermal compensation, based on the time and current position as using average temperature for the obtained location.
- Ephemeris error - sometimes, satellite orbit is altered and satellite is not where it is intended to be, so the distance between satellite and receiver is affected. GPS receiver is unaware of the position deviation; thus, it has an impact on the positioning accuracy.
Some of those phenomena can be handled in a tricky way (i.e. ionosphere deflection impacts different way signals with different frequency thus Glonass system can handle this issue almost real-time by calculating error, differential-based way) while others can be applied post-factum or live using corrections sent via other channels.
A detailed description of the impact of the aforementioned factors for accuracy and performance is presented below in section GNSS Performance and Accuracy.
GNSS History
US GPS NAVSTAR

- The United States Navy conducted satellite navigation experiments in the mid-1960s to track US submarines carrying nuclear missiles. With six satellites orbiting the poles, submarines were able to observe the satellite changes in Doppler and pinpoint the submarine's location within a matter of minutes.
- In the early 1970s, the Department of Defense (DoD) wanted to ensure a robust, stable satellite navigation system would be available. Embracing previous ideas from Navy scientists, the DoD decided to use satellites to support their proposed navigation system. DoD then followed through and launched its first Navigation System with Timing and Ranging (NAVSTAR) satellite in 1978.
- The 24 satellite system became fully operational in 1993. When selective availability was lifted in 2000, GPS had about a five-meter (16 ft) accuracy.
- The latest stage of accuracy enhancement uses the L5 band and is now fully deployed. GPS receivers released in 2018 that use the L5 band can have much higher accuracy, pinpointing to within 30 centimeters or 11.8 inches.

RF GLONASS

- The first proposal to use satellites for navigation was made by V.S.Shebashevich in 1957. This idea was born during the investigation of the possible application of radio-astronomy technologies for aeronavigation. Further investigations were conducted in a number of the Soviet institutions to increase the accuracy of navigation definitions, global support, daily application, and independence from weather conditions. The research results were used in 1963 for an R&D project on the first Soviet low-orbit “Cicada” system.
- In 1967 the first navigation Soviet satellite “Cosmos-192” was launched. The navigation satellite provided continuous radio navigation signal transmission on 150 and 400 MHz during its active lifetime.
- he “Cicada” system of four satellites was commissioned in 1979. The GLONASS system was formally declared operational in 1993. In 1995 it was brought to a fully operational constellation (24 GLONASS satellites of the first generation).
- In 2008 “Cicada” and “Cicada-M” users started to use the GLONASS system and the operation of those systems was halted. The low-orbit systems couldn't meet the requirements of a great number of users.

EU GALILEO

- The first Galileo test satellite, the GIOVE-A, was launched on 28 December 2005, while the first satellite to be part of the operating system was launched on 21 October 2011.
- As of July 2018, 26 of the planned 30 active satellites are in orbit. Galileo started offering Early Operational Capability (EOC) on 15 December 2016, providing initial services with a weak signal and is expected to reach Full Operational Capability (FOC) in 2019.
- The complete 30-satellite Galileo system (24 operational and 6 active spares) is expected by 2020.
- It is expected that the next generation of satellites will begin to become operational by 2025 to replace older equipment. Older systems can then be used for backup capabilities.

CHINA BeiDou (BDS)

- It consists of two separate satellite constellations. The first BeiDou system, officially called the BeiDou Satellite Navigation Experimental System and also known as BeiDou-1, consists of three satellites which since 2000 has offered limited coverage and navigation services, mainly for users in China and neighboring regions. Beidou-1 was decommissioned at the end of 2012.
- The second generation of the system, officially called the BeiDou Navigation Satellite System (BDS) and also known as COMPASS or BeiDou-2, became operational in China in December 2011 with a partial constellation of 10 satellites in orbit.
- Since December 2012, it has been offering services to customers in the Asia-Pacific region.
- On December 27, 2018, Beidou-3 officially began to provide global services.

GNSS SEGMENTS
GNSS satellite systems consist of three major components or “segments”: space segment, control segment, and user segment.
Space Segment The space segment consists of GNSS satellites, orbiting about 20,000 km above the earth. Each GNSS has its own “constellation” of satellites, arranged in orbits to provide the desired coverage. Each satellite in a GNSS constellation broadcasts a signal that identifies it and provides its time, orbit, and status.
Control Segment The control segment comprises a ground-based network of master control stations, data uploading stations, and monitor stations; in the case of GPS, two master control stations (one primary and one backup), four data uploading stations, and 16 monitor stations, located throughout the world. In each GNSS system, the master control station adjusts the satellites’ orbit parameters and onboard high-precision clocks when necessary to maintain accuracy. Monitor stations, usually installed over a broad geographic area, monitor the satellites’ signals and status and relay this information to the master control station. The master control station analyses the signals then transmits orbit and time corrections to the satellites through data uploading stations.
User Segment The user segment consists of equipment that processes the received signals from the GNSS satellites and uses them to derive and apply location and time information. The equipment ranges from smartphones and handheld receivers to sophisticated, specialized receivers used for high-end survey and mapping applications.
GNSS Antennas GNSS antennas receive the radio signals that are transmitted by the GNSS satellites and send these signals to the receivers. GNSS antennas are available in a range of shapes, sizes, and performances. The antenna is selected based on the application. While a large antenna may be appropriate for a base station, a lightweight, low-profile aerodynamic antenna may be more suitable for aircraft or Unmanned Aerial Vehicles (UAV) installations. Figure 8 presents a sampling of GNSS antennas.
GNSS Receivers Receivers process the satellite signals recovered by the antenna to calculate position and time. Receivers may be designed to use signals from one GNSS constellation or more than one GNSS constellation. Receivers are available in many form factors and configurations to meet the requirements of the varied applications of GNSS.
GNSS Augmentation Positioning based on standalone GNSS service is accurate to within a few meters. The accuracy of standalone GNSS, and the number of available satellites, may not be adequate for the needs of some users. Techniques and equipment have been developed to improve the accuracy and availability of GNSS position and time information.

GPS terrestrial segment

- 33 in-orbit spacecraft,
- Operator AFSPC,
- Type military, civilian,
- Orbital altitude: 20,180 km,
- 6 orbital planes MEO,
- Satellite lifetime: 10 years,
- Satellite mass: 1080 kg,
- Satellite body dimensions: 1,9 m × 1.93 m × 1.52 m,
- Accuracy 500-30 cm,
- Coverage Global,
GLONASS terrestrial segment
- 26 in-orbit spacecrafts,
- Operator Roskosmos,
- Type military, civilian,
- Orbital altitude: 19 130 km,
- 3 orbital planes MEO,
- Satellite lifetime: 10 years
- Satellite mass: 1450 kg,
- Accuracy 2.8-7.38 m
- Coverage Global
Galileo terrestrial segment

- 30 in-orbit spacecrafts
- Operator GSA, ESA
- Type civilian, commercial,
- Orbital altitude: 23,222 km,
- 3 orbital planes MEO,
- Satellite lifetime: >12 years
- Satellite mass: 675 kg
- Satellite body dimensions: 2.7 m × 1.2 m × 1.1 m
- Span of solar arrays: 18.7 m,
- Power of solar arrays: 1.5 kW,
- Accuracy 1 m (public), 1 cm (encrypted),
- Coverage Global
BeiDou terrestrial segment
- 33 in-orbit spacecrafts
- Operator CNSA,
- Type military, commercial,
- Orbital altitude: 23,222 km,
- Orbital planes MEO, IGSO, GEO
- Satellite lifetime: >12 years
- Satellite mass: 675 kg,
- Accuracy 10 m (public) 10 cm (encrypted),
- Coverage Global
GNSS systems comparison
All modern and operating GNSS systems like GPS, GLONASS, Galileo, or BeiDou which were developed by different countries and organizations use terrestrial segment containing satellites orbiting over the Earth. Each satellite constellation occupies its own unique orbit segments. The entire view of the GNSS constellation is present in the picture above. Modern positioning and timing modules have evolved to take advantage of multiple GNSS constellations at once. Combining multiple satellite systems improves the availability of signals, gives operators more access, and increases accuracy.

GPS Signals
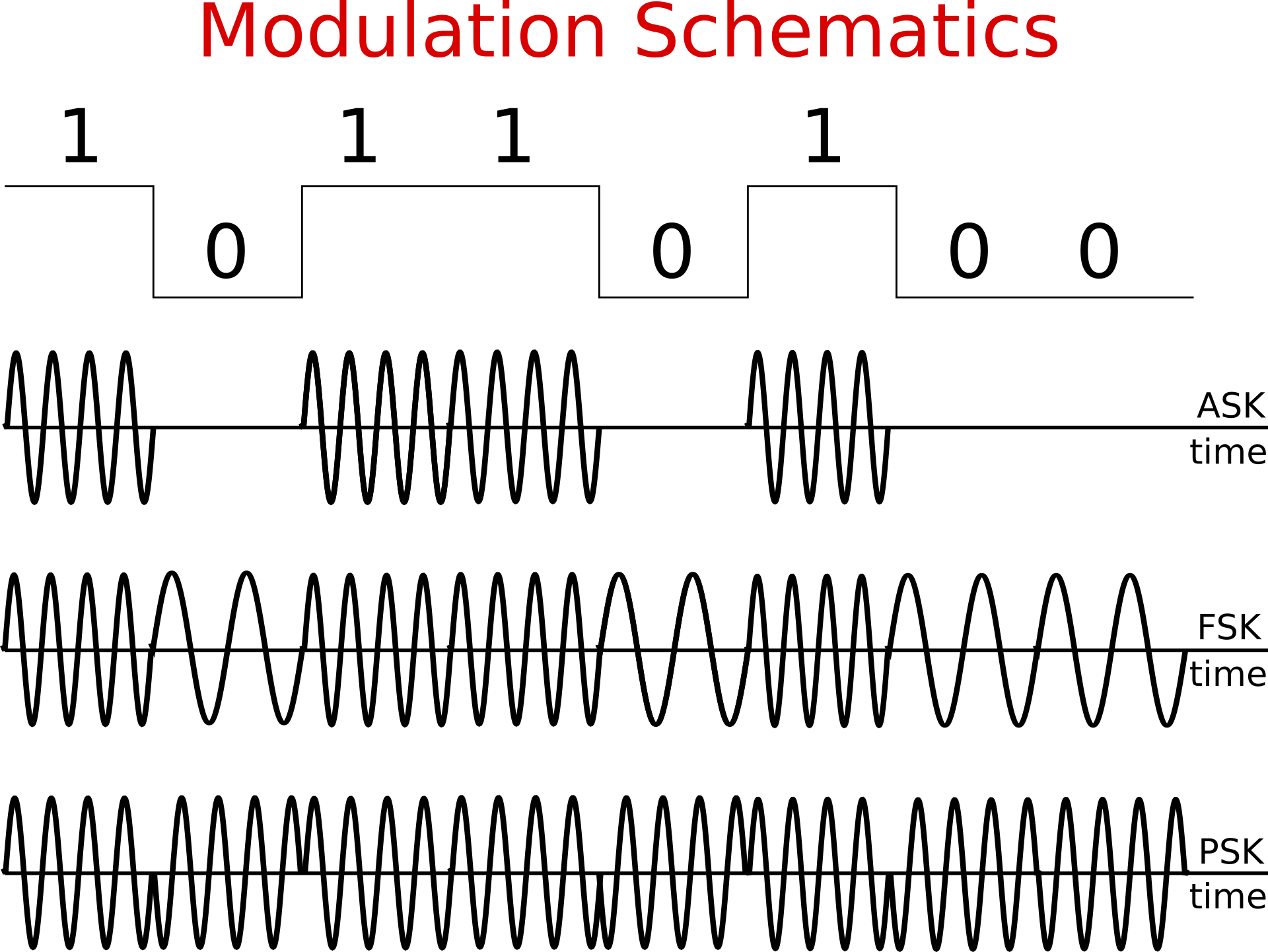
The generated signals onboard the satellites are based or derived from the generation of a fundamental frequency ƒo=10.23 MHZ. The signal is controlled by an atomic clock and has stability in the range of 10−13 over one day. Two carrier signals in the L-band, denoted L1 and L2, are generated by integer multiplications of ƒo. The carriers L1 and L2 are biphase modulated by codes to provide satellite clock readings to the receiver and transmit information such as the orbital parameters. The codes consist of a sequence with the states +1 or -1, corresponding to the binary values 0 or 1. It contains information on the satellite orbits, orbit perturbations, GPS time, satellite clock, ionospheric parameters, and system status messages. The modulation of L1 by P-code, C/A-code, and navigation message (D), is done using the quadrature phase-shift keying (QPSK) scheme. The C/A-code is placed on the LI carrier with 90° offset from the P-code since they have the same bit transition epochs. For the L1 and L2 we have:
L1(t) = a1P(t)W(t)cos(2πf1t)+a1C/A(t)D(t)sin(2πf1t) L2(t) = a2P(t)W(t)cos(2πf2t)
GPS signals in Space The signal broadcast by the satellite is a spread spectrum signal, which makes it less prone to jamming. The basic concept of the spread spectrum technique is that the information waveform with small bandwidth is converted by modulating it with a large-bandwidth waveform. The navigation message consists of 25 frames with each frame containing 1500 bits, and each frame is subdivided into 5 sub-frames with 300 bits. The control segment periodically updates the information transmitted by the navigation message. It is well known that the presence of dual-frequency measurements (L1 and L2) has good advantages to eliminate the effect of the ionosphere and enhance the ambiguity resolution, especially for the high precision measurements.

Glonass signals
Glonass transmit C/A-code on L1, P-code on L1 and L2. Glonass observables (code and phase) are similar to GPS. The main difference between GPS and GLONASS is that GLONASS uses Frequency Division Multiple Access (FDMA) technology to discriminate the signals of different satellites. Still, GPS and Galileo use (Code Division Multiple Access, CDMA) to distinguish between the satellites. All Glonass satellites transmit the same C/A- and P-codes, but each satellite has slightly different carrier frequencies.
𝑓_1^𝑛 = 1602+0.5625.n MHz 𝑓_2^𝑛 = 1246+0.4375.n MHz with (𝑓_1^𝑛)/(𝑓_2^𝑛 )=9/7
where n is the frequency channel number 1 ≤ n ≤ 24 , covering a frequency range in L1 from 1602.5625MHz to 1615.5MHz.
- The navigation message is contained in so-called subframes, which have a duration of 2.5 minutes.
- Each subframe consists of five frames with a duration of 30 seconds.
- The navigation message contains information, similar to GPS navigation message, about the satellite orbits, their clocks, among others.

Galileo signals
Galileo provides several navigation signals in right-hand circular polarization (RHCP) in the frequency ranges of 1164–1215 MHz (E5a and E5b), 1260–1300 MHz (E6) and 1559–1592 MHz (E2-L1-E1) that are part of the Radio Navigation Satellite Service (RNSS) allocation. All Galileo satellites share the same nominal frequency, making use of code division multiple access (CDMA) techniques. Galileo uses a different modulation scheme for its signals, the binary offset carrier (BOC) and quadrature-phase skip keying (QPSK).


BeiDou signals
BeiDou transmits navigation signals in three frequency bands: B1, B2, and B3, which are in the same area of L-band as other GNSS signals. To benefit from the signal interoperability of BeiDou with Galileo and GPS China announced the migration of its civil B1 signal from 1561.098 MHz to a frequency centered at 1575.42 MHz — the same as the GPS L1 and Galileo E1 civil signals — and its transformation from a quadrature phase-shift keying (QPSK) modulation to a multiplexed binary offset carrier (MBOC) modulation similar to the future GPS L1C and Galileo’s E1.

GNSS signal processing
The main function of the signal processor in the receiver is the reconstruction of the carriers and extraction of codes and navigation messages. After this stage, the receiver performs the Doppler shift measurement by comparing the received signal with a reference signal generated by the receiver. Due to the motion of the satellite, the received signal is Doppler shifted. The code ranges are determined in the delay lock loop (DLL) by using code correlation. The correlation technique provides all components of bi-modulated signals. The correlation technique is performed between the generated reference signal and the received one. The signals are shifted concerning time so that they are optimally matched based on mathematical correlation. The GNSS receiver could be designed to track the different GNSS signals and could be of many types:
- The first type could process all GNSS signals GPS L1, L2, L5, and Galileo OS, CS using L1, E5, and E6, and also Glonass L1 and L2.
- The second type uses free signal and codes, GPS L1 and L2C and Galileo OS, on L1 and E5.
- The third type uses L1 and E5.
- Forth type uses GPS L1 and L2 (which are already in the market).
- Fifth type uses GPS and Glonass signals (which already exist).

GNSS differential position
There is an increased interest in differential positioning due to the numerous advantages of wireless communications and networks. Most of the errors that affect GNSS are common between the receivers, which observe the same set of satellites. Thus, by making differential measurements between two or more receivers, most of these errors could be canceled. The basic concept of differential position is the calculation of position correction or range correction at the reference receiver and then sending this correction to the other receiver via radio link.

GNSS Wide Area Augmentation System (WAAS)
Wide Area Augmentation System (WAAS) is a new augmentation to the United States Department of Defense’s (DoD) Global Positioning System (GPS) that is designed to enhance the integrity and accuracy of the basic GPS capability. The WAAS uses geostationary satellites to receive data measured from many ground stations, and it sends information to GPS users for position correction. Since WAAS satellites are of the geostationary type, the Doppler frequency caused by their motion is very small. Thus, the signal transmitted by the WAAS can be used to calibrate the sampling frequency in a GPS receiver. The WAAS signal frequency is at 1575.42 MHz. The WAAS services are available on both L1 and L5.

GNSS Correction Systems
Selection of the appropriate augmentation method or correction service depends on the performance required for vehicle or aircraft navigation software. There are essentially four levels of positioning: standalone uncorrected; positioning derived from publicly available correction services such as the WAAS network in North America or Europe’s EGNOS system; positioning solutions derived from globally available subscription-based L-band services; and regional/ local RTK network solutions.
Standalone uncorrected and WAAS/EGNOS type solutions provide position accuracy ranging from 1-10 meters. On the other end of the scale, RTK correction networks provide the most accurate centimeter-level solutions. While L-band solutions deliver corrections directly to the GNSS receiver via satellite, RTK solutions require a base station and a radio to get the corrections needed, limiting operator flexibility and increasing total system cost and complexity.
With subscription-based L-band correction services, users receive Precise Point Positioning (PPP) corrections to help mitigate and remove measurement errors and position jumps. PPP solutions utilize modeling and correction products including precise satellite clock and orbit data to enhance accuracy.

GNSS EGNOS
The European Geostationary Navigation Overlay Service (EGNOS) is being developed by the European Space Agency (ESA), for the Safety of Air Navigation (Eurocontrol). EGNOS will complement the GNSS systems. It consists of three transponders installed in geostationary satellites and a ground network of 34 positioning stations and four control centers, all interconnected. EGNOS as WAAS broadcast the differential corrections to the GNSS users through Geostationary satellites, in the European region and beyond.


Entire EGNOS system contain Ground Segment, Space Segment, Support segment, Space Segment and User Segment
Ground segment
A network of 40 Ranging Integrity Monitoring Stations (RIMS), 2 Mission Control Centres (MCC), 6 Navigation Land Earth Stations (NLES), and the EGNOS Wide Area Network (EWAN), which provides the communication network for all the components of the ground segment.
- 40 RIMS: the main function of the RIMS is to collect measurements from GPS satellites and transmit these raw data each second to the Central Processing Facilities (CPF) of each MCC. The configuration used for the initial EGNOS OS includes 40 RIMS sites located over a wide geographical area.
- 2 MCC: receive the information from the RIMS and generate correction messages to improve satellite signal accuracy and information messages on the status of the satellites (integrity). The MCC acts as the EGNOS system’s 'brain'.
- 6 NLES: the NLESs (two for each GEO for redundancy purposes) transmit the EGNOS message received from the central processing facility to the GEO satellites for broadcasting to users and to ensure the synchronization with the GPS signal.

Support segment
In addition to the stations/centers, the system has other ground support installations that perform the activities of system operations planning and performance assessment, namely the Performance Assessment and Checkout Facility (PACF) and the Application Specific Qualification Facility (ASQF) which are operated by the EGNOS Service Provider (ESSP).
- PACF: provides support to EGNOS management in such areas as performance analysis, troubleshooting, and operational procedures, as well as upgrade of specification and validation, and support to maintenance.
- ASQF: provides civil aviation and aeronautical certification authorities with the tools to qualify, validate and certify the different EGNOS applications.
Space Segment
Composed of three geostationary satellites broadcasting corrections and integrity information for GPS satellites in the L1 frequency band (1575,42 MHz). This space segment configuration provides a high level of redundancy over the whole service area in case of a geostationary satellite link failure. EGNOS operations are handled in such a way that, at any point in time, at least two of the three GEOs broadcast an operational signal.

User Segment
The EGNOS User segment is comprised of EGNOS receivers that enable their users to compute their positions with integrity accurately. To receive EGNOS signals, the end-user must use an EGNOS-compatible receiver. Currently, EGNOS compatible receivers are available for such market segments as agriculture, aviation, maritime, rail, mapping/surveying, road a location-based service (LBS).
GNSS RTK Network
RTK network concept is similar to the WADGNSS, but the reference stations are generally distributed over a regional area, and the network control center is responsible for transmitting the phase measurement correction to the GNSS user (rover receiver). Mobile wireless networks are generally used in this type of application due to the need for duplex communication where the rover receiver should send the approximate position initially to the network processing center. The network processing center computes VRS observations and sends them to the user. The number of reference stations in the single RTK approach is 30 stations in 10,000 km2.

GNSS Performance and Accuracy
Four parameters are used to characterize GNSS performance which is based on the RNP specification:
- Accuracy: The accuracy of an estimated or measured position of a craft (vehicle, aircraft, or vessel) at a given time is the degree of conformance of that position with the true position, velocity, and/or time of the craft. Since accuracy is a statistical measure of performance, a statement of navigation system accuracy is meaningless unless it includes a statement of the uncertainty in a position that applies.
- Availability: The availability of a navigation system is the percentage of time that the services of the system are usable by the navigator. Availability is an indication of the ability of the system to provide usable service within the specified coverage area. Signal availability is the percentage of time that navigation signals transmitted from external sources are available for use. It is a function of both the physical characteristics of the environment and the technical capabilities of the transmitter facilities.
- Continuity: The continuity of a system is the ability of the total system (comprising all elements necessary to maintain craft position within the defined area) to perform its function without interruption during the intended operation. More specifically, continuity is the probability that the specified system performance will be maintained for the duration of a phase of operation, presuming that the system was available at the beginning of that phase of operation.
- Integrity: Integrity is the measure of the trust that can be placed in the correctness of the information supplied by a navigation system. Integrity includes the ability of the system to provide timely warnings to users when the system should not be used for navigation.
The basic idea of GNSS systems is establishing a satellite network in which each satellite sends a signal at a defined time to receivers. The distance from the satellite to the receiver can be calculated by measuring the time difference from the transmitter to the receiver. Using at least 4 satellites simultaneously the 3D Position of the receiver (vertical and horizontal) can be calculated if the position of each satellite is known. The accuracy of GNSS Systems is influenced by the realization of the needed infrastructure, causing the influences on the transmitted signals that make the position calculation possible. Satellites used for GNSS Systems are moving at approx. 4 km per second (to the earth) under varying conditions. Due to the movement of the receiver and the transmitter, there is the need to take a look at the factors that determine the accuracy of GNSS Systems.
The positioning accuracy depends on many factors. Position and time error given by GPS receivers are influenced by:
- Ionospheric delay - disturbances in the speed of propagation of signals from satellites in the ionosphere (error about 7 m),
- Tropospheric delay - an analogous phenomenon in the troposphere caused by changes in humidity, temperature, and air pressure (± 0.5 m),
- Ephemeris error - differences between the theoretical and actual position of the satellites (± 2.5 m),
- satellite clock inaccuracy (± 2 m),
- receiving reflected signals that reach the receiver by other routes than directly from the satellite (± 1 m),
- Receiver errors - noise disrupting the transmission, inaccuracies in the calculation procedures in the software (± 1 m).
- US Department of Defense deliberate action. To reduce the accuracy of GPS receivers, disturbances known as Selective Availability (SA) were introduced into the C/A signal. GPS receivers were able to reduce SA interference. However, these disorders were turned off on May 1, 2000, and remained turned off after September 11, 2001.
The idea of Geometric DOP is to state how errors in the measurement will affect the final state estimation. This can be defined as:
GDOP = Δ(Output Location) / Δ(Measured Data)
The low DOP value represents a better positional precision due to the wider angular separation between the satellites used to calculate a unit's position. Other factors that can increase the effective DOP are obstructions, such as nearby mountains or buildings.
DOP can be expressed as many separate measurements:
- HDOP – horizontal dilution of precision
- VDOP – vertical dilution of precision
- PDOP – position (3D) dilution of precision
- TDOP – time dilution of precision
- GDOP – geometric dilution of precision
Sample EGNOS Dilution Of Precision (HDOP) shows picture above:

GNSS Ionospheric signal propagation over a region shows another picture above:

EDCN Introduction
EGNOS Data Collection Network (EDCN) was created in 2001, to acquire experience but also develop procedures on how to assess and validate the performance provided by augmentation systems like EGNOS. This data collection network is composed of multiple stations hosted often at Universities. It is complemented by the contributions from Air Navigation Service Providers interested in certifying and providing SBAS services in their national air space (among others AENA Spain, DTI/DSNA France, NATS UK, ENAV Italy, NAV Portugal, Skyguide Switzerland, PANSA Poland). All collected data is managed by EUROCONTROL in France, in charge not only of developing all the software used to process the data defined in the avionics standards, but also the definition of procedures and accumulation of results to present them coherently to the Regulator body in charge of the ESSP certification as EGNOS Operator.
EDCN Components
- GNSS satellite constellations – GPS NAVSTAR, GLONAS, Galileo,
- EGNOS satellites – Inmarsat IOR-W,AOR-E,Artemis
- GNSS ground-mounted receivers (NavTech, Septentrio, etc.)
- PC computers, LAN, WAN – Internet,
- Software – PEGASUS powered by EUROCONTROL
- Central Database,


EGNOS availability maps
- 100% >= Availability >= 99% : blue
- 99% > Availability >= 98% : green
- 98% > Availability >= 95% : yellow
- Availability < 95% : red

EGNOS Signal Continuity
Availability EGNOS SIS signal for PRN120 satellite.

There was no SIS broadcast during 23rd and 24th July 2011, for further details see July Performance Report available at ESSP web page

GNSS Receiver hardware chips
Autonomous UAVs usually rely on a GPS position signal which, combined with inertial measurement unit (IMU) data, provides highly precise information that can be implemented for control purposes. To avoid accidents in an area heavily populated by other UAVs or manned vehicles, it is necessary to know exactly where the UAV is located at all times. Equipped with GPS, a UAV can not only provide location and altitude information but necessary vertical and horizontal protection levels. Typical GNSS receivers which can be easily used in the UAV platforms are listed below.
Multi-GNSS Receiver Module Model GN-87
GN-8720is a stand-alone, complete GNSS receiver module that can provide accurate GNSS PVT (Position, Velocity & Time) information through the serial communication channel. The key device inside is eRideOPUS 7, the latest monolithic GNSS receiver chip that contains an ARM9 processor for signal tracking and processing, high-performance integrated LNA, PLL Synthesizer, Down-converter, ADC, and DSP. GN-8720 also contains Flash ROM for firmware and data storage, TCXO for reference clock, 32kHz crystal for RTC (Real-time clock), L1 band SAW filter, and power-on reset circuit. The main features are as follows:
- Supports GPS, GLONASS, SBAS, QZSSand Galileo,
- Outputs a time pulse (1PPS) synchronized to UTC time,
- Software upgrade capability by Flash ROM,
- Active Anti-jamming capability to suppress effects of CW jammers,
- Multipath mitigation effects,
- Works in both Autonomous mode and Assisted mode,
- GPS/GLONASS high indoor sensitivity,
- Fast TTFF of typically <1 second when in hot and 30seconds in warm and 33 seconds in cold start conditions,
- Available of an active and passive antenna,
- Unordered List ItemLow profile, small SMT package reducing the mounting area and mounting cost,

ACEINNA OpenRTK330L
ACEINNA’s OpenRTK330L includes a triple-band RTK/GNSS receiver coupled with redundant inertial sensor arrays to provide cm-level accuracy, enhanced reliability, and superior performance during GNSS outages. The OpenRTK330L integrates a very precise 2 Degree/Hour IMU to offer ten to thirty seconds of high accuracy localization during full GNSS denial. This enables autonomous system developers to safely deliver highly accurate localization and position capabilities in their vehicles at prices that meet their budgets. OpenRTK330L’s embedded Ethernet interface allows easy and direct connection to GNSS correction networks around the world. OpenRTK330L’s CAN bus interface allows simple integration into existing vehicle architectures. The multi-band GNSS receiver can monitor all global constellations (GPS, GLONASS, BeiDou, Galileo, QZSS, NAVIC, SBAS) and simultaneously track up to 80 channels. The module has RF and baseband support for the L1, L2, and L5 GPS bands and their international constellation signal equivalents.

BCM47755
The BCM47755 supports two frequencies (L1+L5), achieves lane-level accuracy outdoors, and much higher resistance to multipath and reflected signals in urban scenarios, as well as higher interference and jamming immunity. The BCM47755 incorporates numerous technologies that enable ultralow power consumption in both the location function and the sensor hub function. The device features a low-power RF path, a Big/Little CPU configuration composed of an ARM-based 32-bit Cortex-M4F (CM4), an ARM-based Cortex-M0 (CM0), and is built in a 28 nm process. The BCM47755 can simultaneously receive the following signals:
- GPS L1 C/A
- GLONASS L1
- BeiDou (BDS) B1
- QZSS L1
- Galileo (GAL) E1
- GPS L5
- Galileo E5a
- QZSS L5

UBLOX NEO-M9N module
The NEO-M9N module is built on the robust u-Blox M9 GNSS chip, which provides exceptional sensitivity and acquisition times for all L1 GNSS systems. The u-Blox M9 standard precision GNSS platform, which delivers meter-level accuracy, succeeds the well-known u-Blox M8 product range. NEO-M9N supports the concurrent reception of four GNSS. The high number of visible satellites enables the receiver to select the best signals. This maximizes the position accuracy, in particular under challenging conditions such as in deep urban canyons. NEO-M9N detects jamming and spoofing events and reports them to the host so that the system can react to such events. Advanced filtering algorithms mitigate the impact of RF interference and jamming, thus enabling the product to operate as intended. A SAW filter combined with an LNA in the RF path is integrated into the NEO-M9N module. This setup allows normal operation even under strong RF interferences, for example, when a cellular modem is co-located with NEO-M9N. NEO-M9N offers backward pin-to-pin compatibility with previous u-Blox generations, which saves designers time and cost when upgrading their design. Software migration requires little effort thanks to the continuous support of UBX messages across product generations.

UAV designed GNSS Receiver modules
The UAV industry requires lightweight heavy-duty fully IP69K or IP67 waterproof and low-power GNSS receiver modules. The sample list of useful UAV GNSS receiver modules which uses different popular GNSS receiver hardware chips are listed below:
Radiolink TS100 Mini GPS Module for Mini PIX Flight Controller
The Radiolink TS100 Mini GPS Module for Mini PIX Flight Controller can measure with a 50-centimeter precision of accuracy when working with concurrent GNSS. The prc-lNA low loss circuit design has enhanced the ability to capture extremely weak signals. The TS100 can seize very weak signals and effective suppression of input interference at the same time.
Description
- Positioning 20 satellites in 6 seconds at open ground and valley station-keeping ability
- Reception of GPS/QZSS LI C/A, GLONASS HOf, BelDou Bl SBASll C/AWAAS, EGNOS, MSAS
- Radiolink TS100 Mini GPS Module for Mini PIX Flight Controller
- Features an M8N GPS decoder chip, with u-Blox UBX-M8030 (M8), 72-channel
- Max update rate: up to 10Hz
- Compatible with: Radiolink Mini PIX
Specification
- Positional accuracy: 50-centimeter precision GNSS
- Velocity precision: 0.1m/s
- Max height: 50000m
- Max speed: 515m/s
- Max acceleration: 4G
- Max update rate: up to 10Hz
Sensitivity
- Tracking and Nav.: -167dBm, Reacquisition: -163dBm
- Cold start: -151dBm, Hot start: -159dBm
- Time to first fix: Cold start: 26s, Hot start: 1s
Connect ports
- Power supply: voltage 5VDC+-5 percent, current 50-55mA
Ports
- GPS UART interface
- Baud rate: 1.2K/4.8K/9.6K/19.2K/38.4K/57.6K/112.5K
- Geomagnetic I2C interface
configuration
- Geomagnetic: QMC5883L which with the same technology as HMC5983 form
- Antenna: 2.5dbI high gain and selectivity ceramic antenna
- Double filter: SAWF(Surface acoustic wave filter) from Murata
Dimensions
- 3.20 x 3.00 x 1.20 cm / 1.26 x 1.18 x 0.47 inches
- Weight: 0.0200 kg

Here 2 GNSS module for Pixhawk 2.1
Description
- Here 2 GNSS for Pixhawk 2.1
- Sensitivity: Tracking and Navigation-167dBm, Hot start- 148dBm, Cold start- 157dBm
- Active antenna and passive antenna
- 72-channel u-blox M8N engine GPS/QZSS L1C/A, GLONASSL10F BeiDou B11, etc.
- Navigation update rate: Max 10Hz
Specification
- Processor: STM32F302
- Compass Gyro Accelerometer: ICM20948
- Barometer: MS5611
- Receive type: 72-channel u-Blox M8N engine GPS/QZSS L1C/A, GLONASSL10F BeiDou B11, Galileo E1B/C SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGAN
- Navigation update rate: Max 10Hz
- Positioning Accuracy: 3D FIX
- Time to first fix: Cold start 26S, Aided start 2S, Reacquisition 1S
- Sensitivity: Tracking and Navigation-167dBm, Hot start- 148dBm, Cold start- 157dBm
- Assisted GNSS: Assist Now GNSS Online, AssistNow GNSS Offline (up to 35 days), AssistNow Autonomous (up to 6 days) OMA SUPL& 3GPP compliant
- Oscillator: TCXO(NEO-M8N/Q)
- RTC Crystal: Built-in
- ROM: Flash(NEO-M8N)
- Available Antennas: Active antenna and passive antenna
- Signal Integrity: Signature feature with SHA 256
Ports
- UART/12C/CAN: JST_GH Main interface, Switch Internally
- STM32 Main programming interface: JST_SUR
Dimensions
- 76mm x 76mm x 16.6mm
- Weight: 49g

Radiolink SE100 GPS Module for PixHawk
Description
- 2.5dbI high gain and selectivity ceramic antenna
- MMIC BGA715L7 from Infineon power amplify IC
- SAWF (Surface acoustic wave filter) form Murata
- HMC5983 from Honeywell geomagnetic
Specification
- Positional Accuracy: 1m precision when working with concurrent GNSS, 2.5m precision when working with single GNSS
- Velocity precision: 0.1m/s
- Max height: 50000m
- Max speed: 515m/s
- Max acceleration: 4G
- Max update rate: up to 18Hz
- Sensitivity Tracking & Nav.: -167dBm; Reacquisition:-163dBm; Cold start:-151dBm; Hot start:-159dBm
- Time to first fix: Cold start: 26s, Hot start: 1s
- Connect ports
- Power supply: voltage 3.3VDC+-5%, current 50~55mA
Ports
- GPS UART interface, baud rate: 1.2K/4.8K/9.6K/19.2K/38.4K/57.6K/112.5K
- Geomagnetic I2C interface
Dimensions
- 48.5 mm x 15.3 mm
- Weight: 34.2 g

UBLOX NEO 6M GPS Module
Description
- Built-in 25*25*4 mm high gain ceramic antenna
- Built-in EEPROM, make sure no data loss
- Built-in reverse polarity protection
- Built-in dual-colour LED, a clear indication of GPS status
Specification
- SuperSense ® Indoor GPS: -162 dBm tracking sensitivity
- Support SBAS (WAAS, EGNOS, MSAS, GAGAN)
- Max speed: 500 m/s
- Voltage: 3.3-6 V
- Inner chip UBLOX NEO 6M
- With EEPROM memory function
- Baud rate 4800-115200
- Refresh rate 1.5 Hz
- Cable length 10 cm
- Support rod length: 12 cm
Dimensions
- 22 mm x 30 mm x 4 mm
- Weight: 12 g
- Antenna: 25 mm x 25 mm x 7 mm

UAV designed GNSS Receiver external antennas
Some GNSS modules require external satellite antennas to improve positioning and reduce the radio signal disruption in different field conditions. In general, such antennas are designed as omnidirectional, heavy-duty, fully IP69K and IP67 waterproof for use in telematics, transportation, and remote monitoring applications. This antenna delivers 3G/2G antenna technology, and GPS/GLONASS/GALILEO for next-generation high bandwidth telematics navigation systems provides an unobtrusive, robust construction that is durable even in extreme environments.
Spartan MA650.ST 2in1 antenna
Specification
- GPS/GLONASS/GALILEO and Cellular 3G/2G
- GPS/GLONASS/GALILEO – High gain LNA up to 32dB 0.3M RG-174 Fakra Code C Blue Jack
- Cellular 3G/2G – 850/900/1800/1900/2100MHz 0.3M NFC200 Fakra Code D Jack
- GSM/GPRS/CDMA/PCS/DCS/UMTS/HSPA
- Low Profile, Robust and Stylish Design
- Construction: Heavy Duty, Integrated Metal Base/Ground-Plane
- No Ground Plane Required
- Case: IP67 and IP69K – Water Resistant
- Dimensions: H: 36mm, Ø: 148mm
- Weight: 570g

BN-345AJ GNSS antenna
BN-345AJ is a multi-star multi-frequency satellite navigation antenna with high gain, miniaturization, high sensitivity, multi-system compatibility. The bottom of the antenna is magnetized for easy attachment. The antenna is made of UV-resistant PC material and ultrasonic technology. It can be sun-proof, high-temperature resistant, and IP67 waterproof. Specification
- Frequency Range: BDS B1/B2/B3 MHz
- GNSS Constellations: GPS L1/L2/L5 GLONASS G1/G2 GALILEO E1/E2/E5a/E5b/E6
- Gain: <5.5 dBi
- Antenna AR: ≤3.0 dB
- Phase center error: ±2 mm
- Polarization: Right-hand circular polarization
- Port Impedance: 50Ω
- Antenna size: 76*72*27 mm
- Weight: 175 g
- Waterproof grade: IP67

BN-244 spiral GNSS antenna
The antenna has the characteristics of small volume, high positioning precision, and lightweight. The total weight of the antenna is less than 30g, which is especially suitable for equipment such as an unmanned aerial vehicle (UAV).
Specification
- Frequency Range: GPS L1/L2 MHz
- GNSS Constellations: GLONASS L1/L2 BDS B1/B2/B3 GALILEO E1/E5b
- Gain: 3 dBi
- Antenna AR: ≤3 dB
- VSWR: ≤1.8
- Polarization: Right-hand circular polarization
- Port Impedance: 50 Ω
- LNA Gain: 33±2 dB
- Noise figure: ≤1.8 dB
- Operating voltage: 3.0V-18.0V
- Operating current: ≤42 mA
- Connector type: SMA-J
- Antenna size: Φ 27.5*58 mm
- Antenna weight: ≤ 30 g
- Waterproof grade: IP67

Indoor navigation techniques
Introduction to the indoor positioning
In the previous chapter Navigation, there is a presentation of the navigation methods for drones that are flying outdoors and can receive satellite signals. To some extent, satellite-based navigation works indoors but usually with much-lowered accuracy and not in the deep shade from the surrounding walls and ceiling. Moreover, outdoor positioning inaccuracy, i.e. 1m, does not impact the mission to the extent as may indoors.
Indoor positioning requires then different techniques, where some of them need additional infrastructure while others base on the on-board of the drone hardware and algorithms. Usually, it applies to smaller drones and requires precision positioning in 3D space, even some 1cm accuracy. There are several techniques available to solve this problem that we present below.
Positioning methods
Among the algorithms used for localization, we can distinguish methods based on the measurement of signal propagation time or measurement of signal strength. Using the signal temporal propagation model, we can use techniques such as:
- AOA (Angle of Arrival) – this method uses the measurement of the angle of the incoming signal from the broadcasting station to approximate the location [1].
- ADOA (Angle Difference of Arrival) – like the AOA method, it is based on calculating the differences of angles of the signal received from the transmitter [2].
Methods that measure the angles can be performed if the receiver is equipped with directional antennas or with a matrix of antennas.
- TOA (Time of Arrival) – with this method the time of arrival of the signal transmitted from the mobile client to the base stations is measured. The distance from each station is calculated by determining the time of arrival of the signal, depending on the speed of wave propagation [3]. Precise synchronization is required in this method.
- TDOA (Time Difference of Arrival) – It is similar to the previous method with one difference; transmitting base stations and receivers do not have to be synchronized with each other. The geometry of this technique is also used in Multirateriation [4].
- TOF (Time of Flight) – it is a technique used to measure distances between several devices. A one-way TOF receiver must be precisely synchronized with the transmitter. In TW TOF (Two Way TOF, also known as RTT – Round Trip Transmission) each device has a transmitter and receiver, and the flight time measurement process includes signal exchange and measurement of results between two cooperating units [5]. One of the devices initiates the internal time measurement and sends the message to the responding unit. The answering device sends its measurements - delay from receipt to response. Using both time measurements internal and external, the initiator calculates the distance.
Among the techniques that use signal propagation, we find techniques that use geometric transformations. These are:
- Triangulation – positioning by angle measurement [6]. Using the knowledge of geometry, we can calculate the receiver's location relative to known transmitter positions. Knowing the angles of incoming signals from at least three transmitters, it is possible to determine the position of the receiver.
- Multilateration – also known as hyperbolic navigation, positioning by measuring the distance difference (or time difference of flight) between the receiver and stations placed at known positions. It is also possible to measure the difference of distance from one sending station to two receivers. As a result of measurements, we obtain a hyperbolic curve with a large number of possible positions. To determine the exact position, a second measurement is made, using different sending stations, in which we get another curve intersecting the first in the place that will be the designated position [7].
- Trilateration - positioning by measuring the distance (or time of flight) from signals coming from many transmitters [8]. Knowledge of the angle of incidence of signals is not needed here. Two intersecting circles marked with a signal from transmitters will allow us to determine the position. Due to noise in measurements, at least three transmitters are used in typical applications. GPS system is a hyperbolic navigation system using the TDOF technique but also determines the TOF according to the receiver's clock.
Using the signal strength model, we can use the RSSI (received signal strength indicator) signal in the receiver, which is a measurement of the power present in a received radio signal. It is provided in Bluetooth and Wi-Fi devices. It can be used to determine the distance from the transmitter, but the transmission power fluctuates due to changes in environment, objects movement which results in inaccurate positioning. That’s why the fingerprinting method is the preferred method for positioning.
- Fingerprinting – It assumes measuring the signal strength in the tested room, at measuring points located at a fixed distance from each other (this distance determines the measurement precision), and based on this data, a map of the signal strength in the room is created. The receiving device then measures the signal strength and compares it with the map mentioned above [9].
There are some technologies based on different principles that can be used in indoor positioning systems, including radio waves, image recognition, visible or infrared light, ultrasound, inertial, and others. Here we shortly present some of the possible solutions.
Inertial and Dead reckoning
These systems use inertial sensors (accelerometers, gyroscopes) on the user to estimate relative rather than absolute location, i.e. the change in position since the last update. They require little or no infrastructure to be pre-installed in buildings [10]. This method is based on a previously determined position and known or approximate speed in time. The biggest problem, in this case, is the inaccuracy of the whole process, which increases over time. To counteract this phenomenon, stationary points are used, and error correction techniques are used. Inertial Navigation System is a system that tracks position by estimating the full 3D trajectory of the sensor at any given moment. For positioning inside buildings, the most commonly used concept is Pedestrian Dead Reckoning [11], the accelerometer built in the smartphone [12] or as the separate device is attached to the body of a moving person and most often counts its steps.
Ultrasound
The principle of operation of systems based on ultrasonic waves comes down to measuring the difference in the time of arrival (TDOA) of information by the receiver from the transmitters, which are arranged in such a way as to cover the entire surface of the building [13]. Knowing distances from transmitters receiver can calculate the current position using the trilateration algorithm. The receiver Systems based on navigation using ultrasound are strongly dependent on temperature and frequency depending on the Doppler shift.
Magnetic field
The Earth has its own natural magnetic field. The field intensity can be easily measured anywhere on its surface. Studies have shown that buildings cause changes in magnetic field values [14]. These changes depend on the building materials used during the construction of the building. Due to the fact that these values do not change over time, it is possible to use them to create a map of the building with a specific magnetic field strength at individual points. This allows determining the position after measuring the magnetic field. This solution does not require any additional infrastructure in the building. The magnetometer is available on virtually every smartphone. This issue was addressed by the Finnish company IndoorAtlas [15].
Light and vision systems
Some systems utilize QR codes as markers placed on the ceiling or walls [16]. A smartphone camera detects and decodes the markers to get the location inside a room. QR code detection and decoding are relatively simple and memory efficient. Each code contains an ID, which delivers enough information to deliver the information required to determine its reference location.
An interesting approach has been proposed by Philips [17]. Its indoor positioning system is based on two, well-known assumptions: every building has to have lights installed, and every LED light flickers with some frequency. This product uses lamps as well-known and calibrated reference points. Each of the lamps has a unique (across given venue) ID. This ID is encoded in the form of the frequency of the LED and is invisible to a human eye. The cellular phone’s camera captures signals, and then the phone decodes the LED ID from its frequency and determines the lamp position on the captured frame.
Both systems require that the cellular phone’s camera is pointed to the ceiling what is rather an unnatural position while using the phone.
Positioning systems can also use infrared light. There can be found systems with mobile IR transmitters (beacons) and stationary receivers [18] or stationary light source and mobile IR receiver [19].
The image processing technology is also used to position the user. The challenge to implement such a system is the complexity and resource-intensiveness of the employed algorithms. Running these algorithms on a mobile device is usually not possible and thus has to be offloaded to a server. Another challenge is to recognize structures that are visually very similar such as plain walls which often repeat within buildings [20]. Although there are some examples of image processing implementations this technique seems to be too demanding to be widely used at this moment, however, early solutions that are implemented, i.e. using Intel Movidius processors used in DJI Tello home drones seems to be very promising https://www.intel.com/content/www/us/en/internet-of-things/computer-vision/overview.html.
Optical flow
One of the oldest and most widely spread techniques for 2D flat positioning using vision systems is Optical Flow. Optical flow positioning uses a similar technique that is present in the optical computer mouse. There is a camera observing the surface under the drone, so the optical flow technique is most suitable for 2D surface positioning, whereas altitude is controlled with a digital barometer. The principles of this technique are pretty simple: a camera facing downwards is observing any movements of the surface; thus deducing, the drone moves then the opposite way. There are many, ready modules to simplify this operation so nowadays, drone implementors not necessarily implement optical flow algorithm themselves, rather you use ready module that returns horizontal and vertical movement. Of course, integrated solutions (i.e. DJI drones using Movidius processor as a flight controller, i.e. DJI Tello) implement this feature natively, supporting not only the 2D surface but even 3D space, using downwards and forward camera.
Sample module (same used in many computer mouse's) is ADNS3080:


Optical flow is easy to integrate, and many flight controllers provide almost “plug and play” support for it. Anyway, they have many serious disadvantages as well:
- Limited range: works best on some centimeters to a couple of meters range. One limitation is fixed optics camera unable to get the sharp image below some distance on the one hand (also drone shadow won't help when hovering close to the surface), and camera's limited resolution when considering high altitude: small changes will remain unnoticeable because of the fixed FOW (Field of View).
- Works best in good light conditions only: as it is a visible range camera used, it works more-less as human eyes do. It won't work correctly in darkness or low ambient light.
- Works only above irregular surfaces. As the camera needs to be able to identify some characteristic points, it won't work over the flat surface as, i.e. glass plane, the same way many PC mice won't work.
- When the surface moves, the drone will follow it!
It is a pretty common observation, that flying the drone with optical flow enabled over, i.e. grass field covered with leaves during autumn causes the drone to drift with the wind directions as leaves are moving over the grass. Moreover, flying at low altitude generates the propeller's airflow stream down hitting the ground, causing the aforementioned leaves to move, thus moving also the drone itself. Be careful and use it as supplementary, not primary technique!
Radio
Among radio technologies used for localization, the most popular ones are RFID, Bluetooth, and Wi-Fi. New UWB technology has built-in functionality to help to implement the positioning systems.
- RFID - using an RFID system, tags are arranged in a fixed pattern on the floor. Absolute coordinates of the location are stored in each tag to provide the position data to the mobile receiver. An RFID reader reads the data from tags that are under the effective area of RFID antenna [21].
- Bluetooth - there are some systems based on Bluetooth technology. Bluetooth Low Energy beacons are small devices that emit a signal which provides mobile applications with the context that they are running in. Using this information mobile phone can calculate the location of the user knowing where the given beacon is located. Such a system that uses information from one beacon only has rather low precision (10-50m) and can be used for applications where only information about presence in a given place is needed. The system based on this technology has been created by Apple, transmitters in this system are called IBeacon [22]. It is also possible to calculate position using signals from more than one beacon [23]. The mobile device scans for beacons around it and using trilateration determines a more accurate location based on the signal strength (RSSI) from different beacons. Such a solution works pretty well in theory. Still, in the real environment, there are many difficulties like noise and signal variation what makes it really hard to calculate the position properly.
- WiFi - wireless networks can also be used to locate users [24]. Access points are usually present in buildings with a wireless network. It is possible to use them for localization purposes. Their arrangement is adjusted so that the signal reaches all places in the building where system users can be found. The user's device has the ability to measure the signal strength of all access points within its range. Each of them has its own individual MAC address. In one place, the signal strength from specific access points remains at a similar level. This allows creating a map that specifies the signal strength from specific access points in different locations (fingerprinting). In this way, it is possible to determine the position after measuring the signal strength of the network access points.
- UWB [25] (Ultra Wideband) is a technology intended for wireless digital data transmission over short distances at low power density. The technology occupies a large (greater than 500MHz) bandwidth of the radio frequency spectrum. Wide bandwidth is obtained with the usage of very short radio pulses. It works with limited power, not causing interferences with other radio systems like Wi-Fi and Bluetooth. This technology can be used for high-precision indoor positioning. Transmitters are equipped with hardware support to the RTT (Round Trip Transmission) time measurement. This allows measuring the TOF with good precision and using trilateration to calculate the position with centimeter accuracy. UWB seems to be the most promising technology for in-door positioning due to good accuracy, ease of implementation, inexpensive modules, small power consumption, and no interferences with other systems.
[1]
R. Peng and M. L. Sichitiu, “Angle of Arrival Localization for Wireless Sensor Networks,” 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, 2006, pp. 374-382.
[2]
B. Zhu, J. Cheng, Y. Wang, J. Yan, and J. Wang, “Three-Dimensional VLC Positioning Based on Angle Difference of Arrival With Arbitrary Tilting Angle of Receiver,” in IEEE Journal on Selected Areas in Communications, vol. 36, no. 1, pp. 8-22, Jan. 2018.
[3]
M. Kanaan and K. Pahlavan Algorithm for TOA-based indoor geolocation, IET Electronics letters. Volume 40, Issue 22, 28 October 2004, p. 1421 – 1422,
[4]
R. Hach and A. Rommel, “Wireless synchronization in a time difference of arrival based real-time locating systems,” 2012 9th Workshop on Positioning, Navigation and Communication, Dresden, 2012, pp. 193-195.
[5]
David Bartlett Essentials of Positioning and Location Technology. Cambridge, 2013, p. 63
[6]
David Bartlett Essentials of Positioning and Location Technology. Cambridge, 2013, p. 63
[7]
L. Asmaa, K. A. Hatim and M. Abdelaziz, “Localization algorithms research in wireless sensor network based on Multilateration and Trilateration techniques,” 2014 Third IEEE International Colloquium in Information Science and Technology (CIST), Tetouan, 2014, pp. 415-419.
[8]
David Bartlett Essentials of Positioning and Location Technology. Cambridge, 2013, p. 63
[9]
Y. Wang, Q. Ye, J. Cheng, and L. Wang, “RSSI-Based Bluetooth Indoor Localization,” in 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 2015 pp. 165-171.
[10]
R. Harle, “A Survey of Indoor Inertial Positioning Systems for Pedestrians,” in IEEE Communications Surveys & Tutorials, vol. 15, no. 3, pp. 1281-1293, Third Quarter 2013.
[11]
Lei Fang et al., “Design of wireless assisted pedestrian dead reckoning system - the NavMote experience,” in IEEE Transactions on Instrumentation and Measurement, vol. 54, no. 6, pp. 2342-2358, Dec. 2005.
[12]
Ms. Najme Zehra Naqvi, dr. Ashwani Kumar, Aanchal Chauhan, Kritka Sahni, Step counting using a smartphone-based accelerometer, “International Journal on Computer Science and Engineering”, Vol. 4 No. 05 May 2012
[13]
S. Holm, “Ultrasound positioning based on time-of-flight and signal strength,” 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, 2012, pp. 1-6.
[14]
T. H. Riehle, S. M. Anderson, P. A. Lichter, J. P. Condon, S. I. Sheikh, and D. S. Hedin, “Indoor waypoint navigation via magnetic anomalies,” 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, 2011, pp. 5315-5318.
[15]
IndoorAtlas positioning overview. https://indooratlas.freshdesk.com/support/solutions/articles/36000079590-indooratlas-positioning-overview
[16]
Suresh, Sujith & Anand, Rubesh & Lenin, D. (2015). A Novel Method for Indoor Navigation Using QR Codes. International Journal of Applied Engineering Research. 10. 451-454.
[17]
Indoor Positioning White Paper. Philips. https://www.lighting.philips.com/main/systems/themes/led-based-indoor-positioning.#form_white_paper
[18]
Sakai, N.; Zempo, K.; Mizutani, K.; Wakatsuki, N. Linear Positioning System based on IR Beacon and Angular Detection Photodiode Array. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcalá de Henares, Spain, 4–7 October 2016.
[19]
R. Salomon, M. Schneider, and D. Wehden, “Low-Cost Optical Indoor Localization System for Mobile Objects without Image Processing,” 2006 IEEE Conference on Emerging Technologies and Factory Automation, Prague, 2006, pp. 629-632.
[20]
C. Marouane, M. Maier, S. Feld and M. Werner, “Visual positioning systems — An extension to MoVIPS,” 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, 2014, pp. 95-104.
[21]
Lim, H.S., Choi, B.S. & Lee, J.M., An Efficient Localization Algorithm for Mobile Robots Based on RFID System, SICE-ICASE International Joint Conference, Busan, Korea, pp. 5945-5950, 2006.
[22]
What is iBeacon, Apple, http://www.ibeacon.com/what-is-ibeacon-a-guide-to-beacons/
[23]
A. De Blas and D. López-de-Ipiña, “Improving trilateration for indoor localization using BLE beacons,” 2017 2nd International Multidisciplinary Conference on Computer and Energy Science (SpliTech), Split, 2017, pp. 1-6.
[24]
R. Joseph and S. B. Sasi, “Indoor Positioning Using Wi-Fi Fingerprint,” 2018 International Conference on Circuits and Systems in Digital Enterprise Technology (ICCSDET), Kottayam, India, 2018, pp. 1-3.
[25]
Y. Cheng and T. Zhou, “UWB Indoor Positioning Algorithm Based on TDOA Technology,” 2019 10th International Conference on Information Technology in Medicine and Education (ITME), Qingdao, China, 2019, pp. 777-782.
